

Paquete básico de accesorios Kria KV260
Fuente de alimentación y adaptador, cable Ethernet, accesorios de cable USB y monitor DP o HDMI™.
por: LogicTronix and PROPHESEE

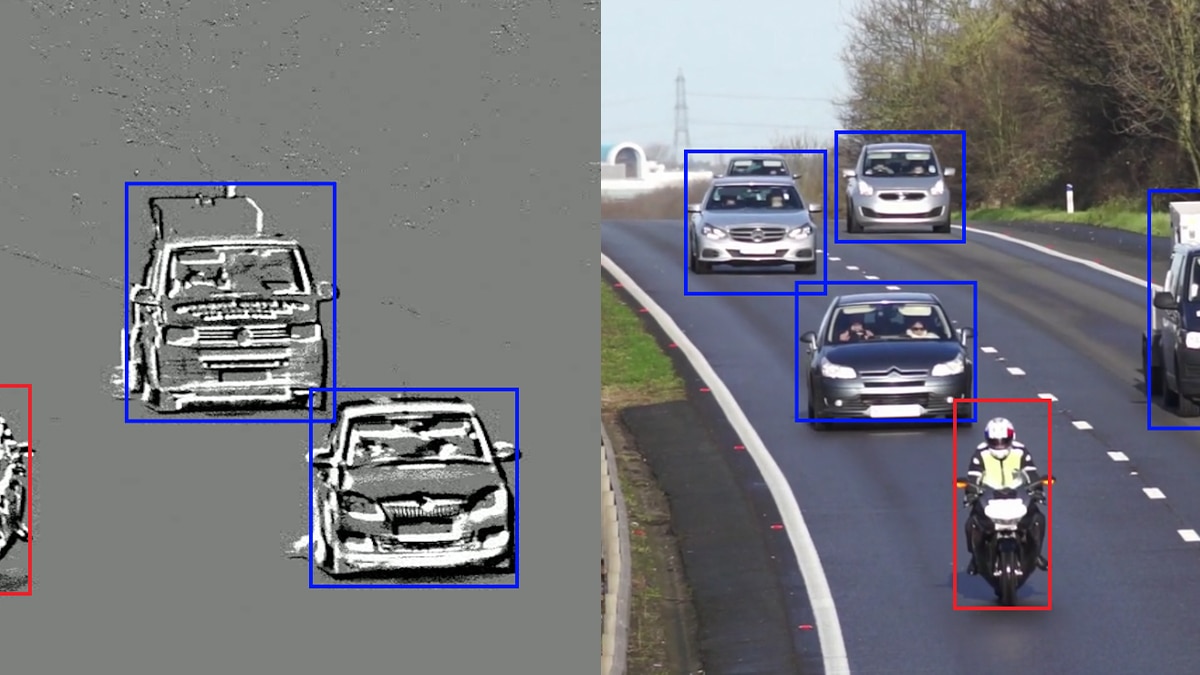
La detección EVB (Event Vision-Based, basada en la visión de eventos) ofrece velocidades de detección aceleradas, un mejor funcionamiento en condiciones de iluminación impredecibles y menores demandas de comunicación en comparación con los sensores basados en cuadros¹. En esta aplicación, se muestra un sensor EVB integrado a través de MIPI en el kit de inicio de IA para visión AMD Kria™ KV260, que ejecuta la detección y el seguimiento de objetos para una aceleración en canal optimizada e integral. La aplicación incluye un diseño de referencia de GitHub, que permite a los clientes personalizarlo para satisfacer sus necesidades específicas.
Esta aplicación de kit de inicio de IA para visión Kria KV260 proporciona sencillos pasos de inicio para la interconexión de cámaras de eventos y la inferencia ML en flujos de datos de eventos. También cuenta con una página de GitHub que te permite modificar el canal para crear tus propias aplicaciones personalizadas.

Cada píxel informa cuando detecta un cambio relativo en la intensidad de iluminación que está por encima o por debajo de un porcentaje definido de la intensidad anterior. En lugar de capturar imágenes en un intervalo de tiempo fijo, la cámara de eventos detecta los cambios de brillo a nivel de píxel de forma asíncrona y crea flujos de datos de eventos. Obtén más información sobre cómo funciona la visión de eventos aquí.
Varias organizaciones proporcionan conjuntos de datos de cámara de eventos. Visita la página del conjunto de datos PROPHESEE o ve a las páginas del conjunto de datos DSEC o del conjunto de datos eTraM. Si tienes una cámara de eventos, puedes capturar y crear un conjunto de datos personalizado basado en sus flujos de datos.
Si la cámara de eventos está disponible con una interfaz MIPI, entonces el ejemplo de diseño Kria SOM SmartCam con Raspberry Pi puede proporcionar orientación general sobre la creación de diseños AMD Vivado y AMD Vitis. Debido a que la cámara de eventos genera datos de eventos de forma diferente a una cámara de cuadros basada en imágenes, el canal IP de Vivado consistirá en un canal MIPI-DMA-PS (DDR), pero no requiere núcleos IP de interpolación, gama y corrección de color intermedios. Para una cámara de eventos basada en USB, puedes configurar el controlador Linux® necesario para la cámara de eventos basada en USB y empezar a capturar y trabajar con la cámara. Aquí hay un enlace GitHub para acceder a un diseño de aplicación. Para una mayor personalización, haz clic en el botón Comunicarse con LogicTronix arriba.
Una cámara de eventos se activa mediante un evento, por lo que, a diferencia de una cámara de imagen RGB, genera flujos de datos cuando hay movimiento en la región enfocada o de captura. Por tanto, los requisitos generales de ancho de banda de procesamiento serán inferiores a los de la cámara y los datos RGB. Una cámara de eventos también puede funcionar a mayor velocidad que una cámara de imágenes tradicional1. Puedes obtener más información sobre las ventajas de las cámaras y la visión basadas en eventos aquí.
En este tutorial, se muestra cómo ejecutar el entrenamiento y la inferencia de ML basado en eventos que es similar a las cámaras basadas en imágenes RGB. También puedes visitar la página del tutorial de PROPHESEE Yolo a fin de obtener entrenamiento/inferencia de una red de Yolo para datos basados en eventos. También hay disponibles otros tutoriales para el entrenamiento y la inferencia de algoritmos o redes ML en datos de cámaras basadas en eventos.
Certain AMD technologies may require third-party enablement or activation. Supported features may vary by operating system. Please confirm with system manufacturer for specific features. No technology or product can be completely secure.
