

Pacote de acessórios básicos Kria KV260
Fonte de alimentação e adaptador, cabo Ethernet, acessórios de cabo USB e monitor DP ou HDMI™.

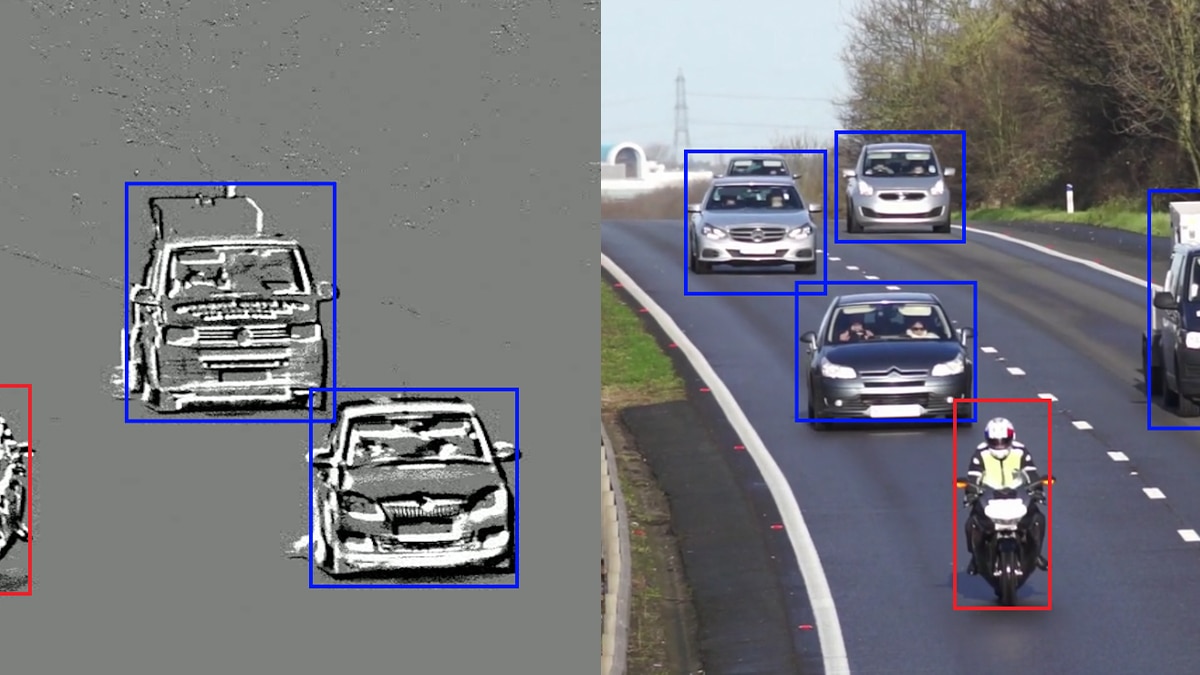
A detecção baseada em visão de eventos (EVB) oferece velocidades de detecção aceleradas, operação aprimorada em condições de iluminação imprevisíveis e demandas de comunicação reduzidas em comparação com sensores baseados em frames.¹ Este aplicativo apresenta um sensor de EVB integrado via MIPI para o kit inicial AMD Kria™ KV260 Vision AI, executando detecção e rastreamento de objetos para aceleração simplificada e completa por pipeline. O aplicativo inclui um projeto de referência do GitHub, permitindo que os clientes o personalizem para atender às necessidades específicas.
Este aplicativo do kit inicial Kria KV260 Vision AI fornece etapas fáceis de criação para interface de câmera de eventos e inferência de ML em fluxos de dados de eventos. Ele também tem uma página do GitHub que permite modificar o pipeline para criar seus próprios aplicativos personalizados.

Cada pixel informa quando detecta uma mudança relativa na intensidade de iluminação que está acima ou abaixo de uma porcentagem definida da intensidade anterior. Em vez de capturar imagens em um intervalo de tempo fixo, a câmera de eventos detecta as alterações no brilho em um nível por pixel de forma assíncrona e cria fluxos de dados de eventos. Saiba mais sobre como funciona a visão de eventos aqui.
Conjuntos de dados de câmeras de eventos são fornecidos por várias organizações. Acesse a página do conjunto de dados da PROPHESEE ou vá para as páginas de conjunto de dados DSEC ou conjunto de dados eTraM. Se você tiver uma câmera de eventos, poderá capturar e criar um conjunto de dados personalizado com base nos fluxos de dados.
Se a câmera de eventos estiver disponível com uma interface MIPI, o exemplo de projeto Kria SOM SmartCam com Raspberry Pi pode fornecer orientação geral sobre a criação de projetos com AMD Vivado e AMD Vitis. Como a câmera de eventos gera dados de eventos de forma diferente de uma câmera de frames baseada em imagens, o pipeline de IP do Vivado consistirá em um pipeline MIPI-DMA-PS (DDR), mas não exige núcleos IP de correção de cor, gama e demosaic entre eles. No caso de uma câmera de eventos baseada em USB, você pode configurar o driver do Linux® necessário para a câmera de eventos baseada em USB e começar a capturar e trabalhar com a câmera. Este é um link do GitHub para um projeto de aplicativo. Para aumentar a personalização, clique no botão Entrar em contato com a LogicTronix, acima.
Uma câmera de eventos é acionada por um evento. Diferentemente de uma câmera de imagem RGB, ela gera fluxos de dados quando há movimento na região de foco ou de captura. Portanto, os requisitos gerais de largura de banda de processamento serão menores do que para dados e câmera RGB. Uma câmera de eventos também pode funcionar a velocidades mais elevadas do que uma câmera de imagem tradicional.1 Mais informações sobre as vantagens das câmeras baseadas em eventos e visão estão disponíveis aqui.
Este tutorial mostra a execução de treinamento e inferência de ML baseados em eventos semelhantes às câmeras baseadas em imagens RGB. Você também pode visitar a página de tutorial do Yolo da PROPHESEE para treinamento/inferência de uma rede Yolo para dados baseados em eventos. Outros tutoriais para treinamento e inferência de algoritmos de ML ou redes sobre dados de câmeras de eventos também estão disponíveis.
Certain AMD technologies may require third-party enablement or activation. Supported features may vary by operating system. Please confirm with system manufacturer for specific features. No technology or product can be completely secure.
