

Pack d'accessoires de base Kria KV260
Alimentation et adaptateur, câble Ethernet, accessoires pour câble USB et moniteur DP ou HDMI™.
par: LogicTronix and PROPHESEE

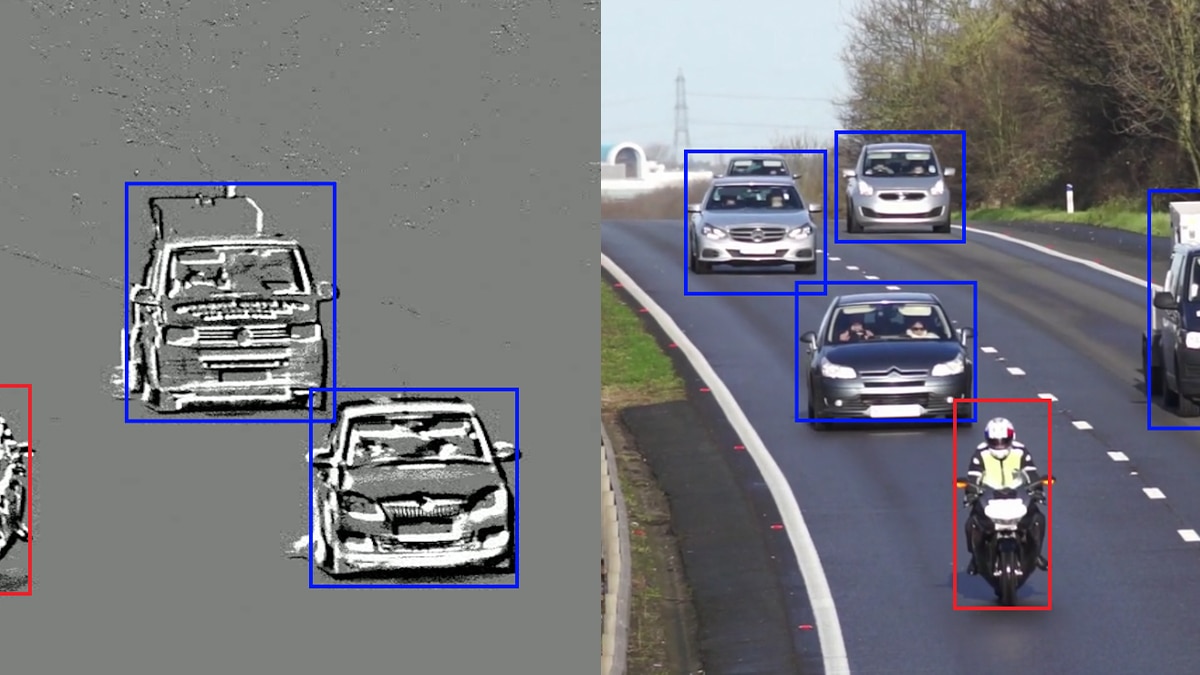
La détection basée sur la vision des événements (EVB) permet de bénéficier de vitesses de détection accélérées, d'un fonctionnement amélioré dans des conditions d'éclairage imprévisibles et d'une réduction des demandes de communication par rapport aux capteurs basés sur les images.¹ Cette application présente un capteur EVB intégré via MIPI au kit de démarrage Vision AI KV260 AMD Kria™, qui exécute la détection et le suivi d'objets pour une accélération rationalisée de bout en bout par pipeline. L'application inclut un design de référence GitHub, permettant aux clients de la personnaliser en fonction de leurs besoins spécifiques.
Cette application Kit de démarrage Vision AI KV260 Kria fournit des étapes de démarrage faciles pour l'interfaçage avec les caméras d'événements et l'inférence ML sur les flux de données d'événements. Elle dispose également d'une page GitHub qui vous permet de modifier le pipeline pour créer vos propres applications personnalisées.

Chaque pixel indique lorsqu'il détecte un changement relatif de l'intensité d'éclairage supérieure ou inférieure à un pourcentage défini de l'intensité précédente. Au lieu de capturer des images à un intervalle de temps fixe, la caméra d'événements détecte les changements de luminosité à un niveau par pixel de manière asynchrone et crée des flux de données d'événements. Pour en savoir plus sur le fonctionnement de la vision des événements, cliquez ici.
Les ensembles de données provenant des caméras d'événements sont fournis par plusieurs organisations. Rendez-vous sur la page Ensemble de données PROPHESEE ou accédez aux pages Ensemble de données DSEC ou Ensemble de données eTraM. Si vous disposez d'une caméra d'événements, vous pouvez capturer et créer un ensemble de données personnalisé basé sur ses flux de données.
Si la caméra d'événements est disponible avec une interface MIPI, le design SmartCam SOM Kria avec un exemple de Raspberry Pi peut fournir des conseils généraux sur la création de designs AMD Vivado et AMD Vitis. Étant donné que les données d'événements générées par la caméra d'événements sont différentes de celles d'une caméra basée sur les images, le pipeline IP Vivado se compose d'un pipeline MIPI-DMA-PS (DDR), mais ne nécessite pas de cœurs IP de correction des couleurs, de gammas et de dématriçage. Pour une caméra d'événements USB, vous pouvez configurer le pilote Linux® nécessaire pour la caméra d'événements USB et commencer les captures et vos tâches avec la caméra. Voici un lien GitHub pour le design d'une application. Pour découvrir d'autres personnalisations, cliquez sur le bouton Contacter LogicTronix ci-dessus.
Une caméra d'événements est déclenchée par un événement. Ainsi, contrairement à une caméra d'images RVB, elle génère des flux de données en cas de mouvement au niveau de la zone ciblée ou de capture. Par conséquent, les exigences globales de traitement de la bande passante sont inférieures aux données et à la caméra RVB. Une caméra d'événements peut également fonctionner à des vitesses plus élevées qu'une caméra d'images traditionnelle1. Pour en savoir plus sur les avantages des caméras basées sur les événements et de la vision, cliquez ici.
Ce didacticiel présente la formation et l'inférence ML basées sur les événements, similaires aux caméras basées sur les images RVB. Vous pouvez également consulter la page du didacticiel Yolo PROPHESEE pour la formation/l'inférence d'un réseau Yolo pour des données basées sur les événements. D'autres didacticiels pour la formation et l'inférence des réseaux ou algorithmes ML sur les données des caméras d'événements sont également disponibles.
Certain AMD technologies may require third-party enablement or activation. Supported features may vary by operating system. Please confirm with system manufacturer for specific features. No technology or product can be completely secure.
