AMD Silo AI and University of Bologna Start Spatial AI Collaboration for Robotics and Autonomous Driving
May 19, 2026
The research collaboration will focus on building geometry-aware perception modules on the AMD ROCm™ open software stack
AMD Silo AI and University of Bologna through its Department of Computer Science and Engineering (DISI) are starting a research collaboration to bring explicit 3D geometry into the Vision Language Action (VLA) and world-model pipeline for robotics and autonomous driving, natively on AMD ROCm™. The work establishes DISI leading research group in stereo vision and depth estimation, CVLab, as the spatial AI node of a two-node academic hub alongside the University of Modena and Reggio Emilia (UniMoRE). Together, the hub feeds into the World Models Foundry, the AMD Silo AI open Physical AI research program, and aligns with European initiatives including the EU AI Factory for Science.
“The next wave of robotics and autonomous driving will depend on AI systems that do more than classify or generate. They must build a grounded understanding of the world in 3D, stay consistent across time and viewpoint, and run efficiently on compute platforms. That is exactly where this collaboration is focused on,” says Niko Vuokko, Senior Director of Software Development, AMD. “Together with DISI and other ecosystem parties, we are building the Spatial AI layer that VLA and world-model pipelines still lack. Our goal is to turn frontier research in geometrical understanding into open, high-performance ROCm native software that moves the whole Physical AI ecosystem forward,” he adds.
DISI CVLab is a leading computer vision group with deep expertise in stereo vision, depth estimation, and 3D reconstruction, and a strong publication record at CVPR, ICCV, and ECCV. AMD Silo AI and CVLab will co-design perception and representation modules that bring explicit 3D geometry and depth into end-to-end VLA and world-model architectures. The work will target AMD Instinct™ MI-series GPUs and future ROCm platforms.
The research has three main thrusts:
Geometry-aware perception backbones, including stereo, depth, multi-view, BEV, and 3D scene representations.
Efficient geometry-aware training and inference on ROCm, including BEV and point-cloud pipelines and geometry modules integrated into end-to-end VLA architectures.
Robotics- and AD-centric evaluation using simulation and real data, with a focus on spatial reasoning, 3D consistency, and robustness to viewpoint and occlusion.
Matteo Poggi, Associate Professor at the University of Bologna (DISI) says, “For years, our work has focused on helping machines recover depth, shape, and structure from images. This collaboration gives us the opportunity to bring that line of research into a larger VLA and world-model stack for robotics and autonomous driving. With AMD, we can translate geometry-aware vision research into ROCm-native building blocks, test them on relevant platforms, and release them openly so they can be used and improved by the wider community.”
The research has direct industry relevance through the partnership with Generative Bionics, a leading Italian robotics company that designs and deploys full-stack humanoid systems for real-world applications. Generative Bionics maintains a tight engineering collaboration with DISI, UniMoRE, and AMD, bringing deployment experience that bridges research into working robotic platforms.
About the University of Bologna and CVLab
The University of Bologna, founded in 1088, is Europe's oldest and one of the most distinguished research universities. CVLab is a research group within the Department of Computer Science and Engineering with deep expertise in stereo vision, depth estimation, 3D reconstruction, and geometry-aware perception. The group has a strong publication record at CVPR, ICCV, ECCV, and ICRA, and contributes actively to open-source benchmarks and tools for 3D vision.


Related Blogs
-
Open Standards, Real Solutions: AMD at SIGGRAPH 2026
AMD heads to DigiPro and SIGGRAPH 2026 to discuss open standards, production technology, and the fine art of Gaussian splatting.
July 17, 2026
-
FastFlowLM Joins AMD to Advance AI Inference
The FastFlowLM team has joined AMD, marking another key step in AMD’s strategy to advance AI performance and efficiency across the stack.
July 17, 2026
-
From Pixels to Predictions: Edge AI Pipeline Acceleration
Learn how AMD Vitis™ AI & AMD Vitis Video Analytics SDK (VVAS) use Gstreamer to build real-time Edge AI pipelines on AMD Versal™ AI Edge Series Gen 2.
July 16, 2026
-
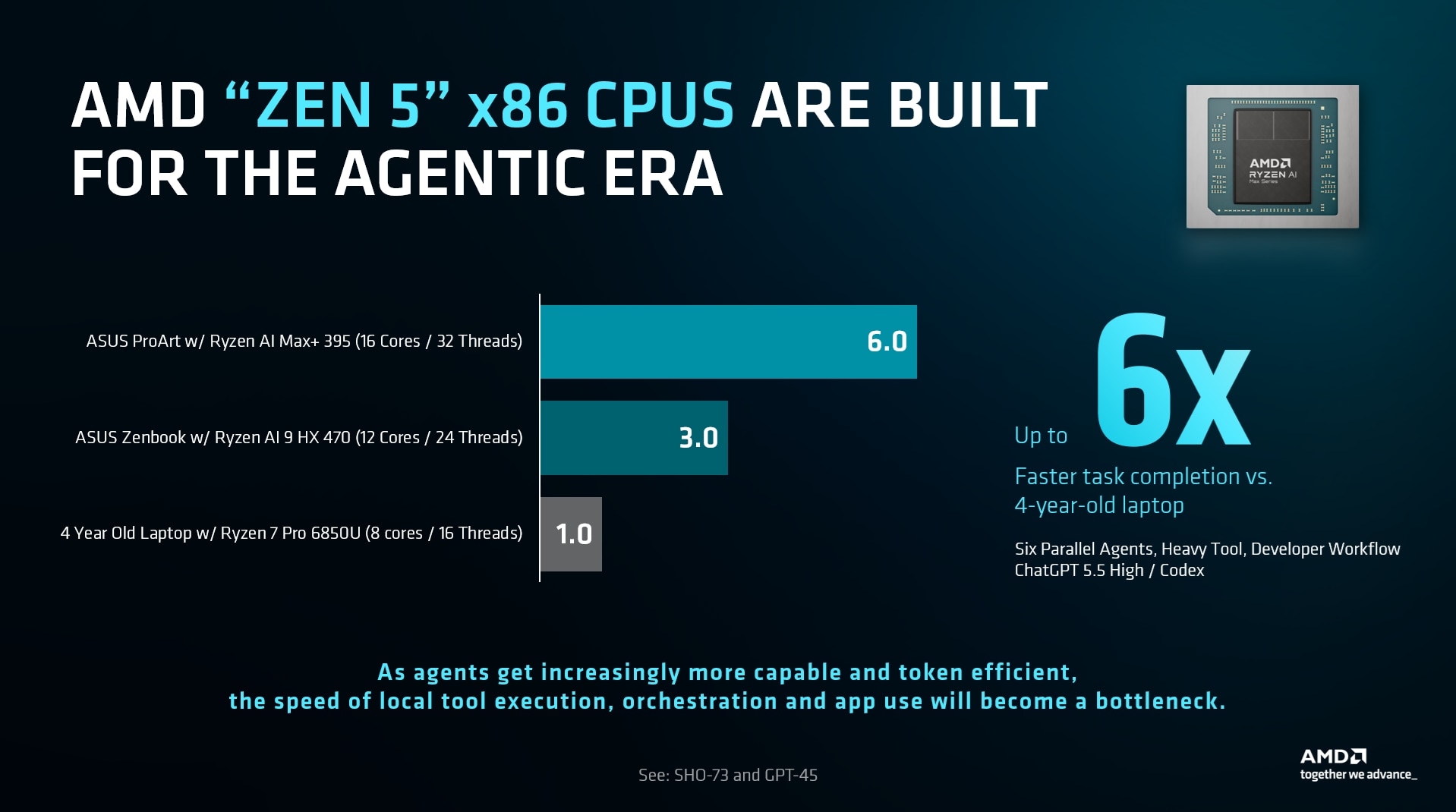
Running Cloud Agents? Your Most Important Upgrade Could be an AMD Zen 5 CPU
As agents begin navigating applications, coordinating tools and completing real work, the local CPU is becoming a critical part of the AI execution pipeline.
July 16, 2026
-
From Vector Search to Agentic RAG: Building an Enterprise Research Analyst with hipVS — ROCm Blogs
Learn how to build an agentic RAG research assistant using hipVS GPU-accelerated vector search on AMD Instinct GPUs, with multi-query decomposition, parallel retrieval, and cited sources synthesis.
July 14, 2026
-
When a Faster Kernel Doesn’t Speed Up Serving: Profiling FP8 KV Cache on AMD Instinct MI308X — ROCm Blogs
Learn how a 34% faster FP8 KV cache kernel delivered 0% E2E speedup, and how profiling attribution exposed the hidden dtype-cast cost on MI308X.
July 14, 2026
-
What to Expect at AMD Advancing AI 2026
Get a preview of AMD Advancing AI 2026, including key themes, sessions, and innovations shaping the future of AI. Discover how industry leaders are coming together to explore real-world use cases and strategies for scaling AI across the enterprise.
July 14, 2026
-
Local Image and Video Generation on AMD Ryzen™ AI Max+ Processor (Windows) — ROCm Blogs
Run ComfyUI natively on Windows on AMD Ryzen AI Max+ with ROCm 7.2.1—SDXL, Flux, and video workflows on the Radeon 8060S, no WSL.
July 13, 2026